Galilean Transformation
Galilean Transformation이란 어떤 Inertial Frame (관성계) \(\mathcal{S}\)에서의 균일한 운동으로부터 또 다른 Inertial Frame \(\mathcal{S}'\)에서의 균일한 운동으로의 Mapping이라고 정의한다.
Galilean Transformation의 종류는 아래와 같다:
- Temporal Translation: \(t \rightarrow t + \Delta t\)
- Spatial Translation: \(\mathbf{r} \rightarrow \mathbf{r} + \Delta \mathbf{r}\)
- Rotational Translation: \(\mathbf{r} \rightarrow \mathcal{R}\mathbf{r}, \ \mathcal{R}\in \mathcal{O}(3)\)
- Galilean Boost: \(\mathbf{r} \rightarrow \mathbf{r} + \mathbf{v} t\)
여기서 각각의 변수는 아래와 같다:
- \(t\): 시간
- \(\mathbf{r}\): 위치 벡터, \(\mathbf{r} \in \mathbb{R}\)
- \(\mathbf{v}\): 속도 벡터
Generalized Coordinates
뉴턴 역학에서는 외부에서 물체에 미치는 힘에 관심을 가지고 그 힘을 기술하기 위해서 벡터량들을 주로 다루게 된다. 따라서 벡터를 표현하기에 유용한 Cartesian Coordinate와 같은 좌표계를 사용하게 된다. 하지만 앞으로 다루려는 Lagrangian은 라그랑주 역학의 관점에서 다루게 되는 물리량이며 라구랑주 역학은 물체의 Kinetic Energy나 Potential Energy와 같은 스칼라량들에 관심을 가지게 된다. 이러한 스칼라량에 관한 분석을 용이하게 하기 위하여 라그랑주 역학은 Generalized Coordinate를 사용하게 된다.
Generalized Coordinates의 정의는 시간에 따른 System의 위치를 Unique하게 나타낼 수 있는 독립적인 물리량들을 좌표계로 구성하는 것을 말한다. 따라서 Generalized Coordinates \(\mathbf{q}\)의 차원(좌표의 개수)은 운동의 자유도와 일치하게 된다. 일반적으로 운동을 스칼라량으로 기술하기 위하여 Generalized Coordinates를 사용하게 된다.
 (출처: Wikipedia)
(출처: Wikipedia)
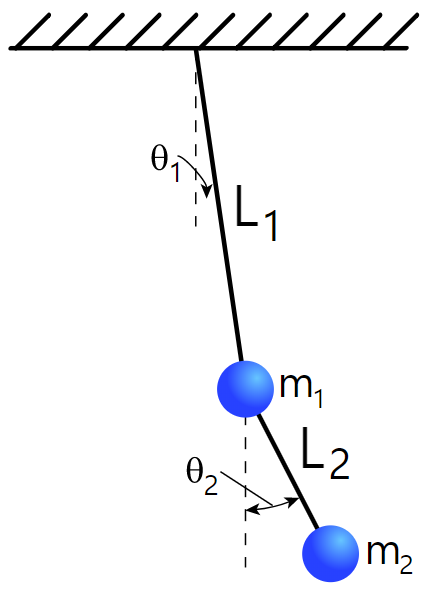
예를 들어보자. 위의 그림은 평면 위에서 운동하는 이중진자의 예시를 설명하는 그림이다. 위의 운동을 Cartesian Coordinate로 기술하면 \((x_1, y_1, x_2, y_2)\)의 4개의 좌표를 사용해야 한다. 하지만 이 운동의 자유도는 2이기 때문에 2개의 좌표 \((\theta_1, \theta_2 )\)로 이 운동을 기술할 수 있을 것이다. 따라서 여기서 사용되는 Generalized Coordinates \(\mathbf{q}\)는 \(\mathbf{q}=(\theta_1, \theta_2 )\)를 만족하게 된다.
이 경우 두 좌표계 사이의 변환은 다음과 같다.
\[\begin{align*} (x_1, y_1) & = (L_1\sin \theta_1, L_1\cos \theta_1) \\ (x_2, y_2) & = (L_1\sin \theta_1 + L_2\sin \theta_2, L_1\cos \theta_1 + L_2\cos \theta_2) \end{align*}\]Principle of Least Action (Hamilton’s Principle)
뉴턴 역학은 어떤 물체에 힘이 작용하고 그 결과 어떤 운동이 발생했다고 설명한다. 따라서 원인과 결과를 생각하는 인과론적인 역학이라고 할 수 있다.
반면, 라그랑주 역학은 운동은 어떤 물리량을 최소로 유지하며 이루어진다는 원리를 따른다고 본다. 이 관점은 운동은 어떤 목적을 가지고 이루어지며 따라서 라그랑주 역학은 목적론적인 역학이라고 할 수 있다.
라그랑주 역학에서 최소로 유지되는 어떤 물리량을 Action이라고 정의한다. 즉, 이 Action을 최소로 유지하며 운동이 이루어진다는 원리를 Principle of Least Action, 또는 Hamilton’s Principle라고 한다.
\(t_1\)에서 \(t_2\)까지의 Action은 다음과 같이 정의한다.
\[S[\mathbf{q}(t)] = \int_{t_1}^{t_2} L(\mathbf{q}(t), \dot{\mathbf{q}}(t), t) dt\]여기서 \(L\)은 Principle of Least Action을 만족하는 어떤 물리량이며 \((\mathbf{q}(t), \dot{\mathbf{q}}(t), t)\)에 대한 Functional이다. 이제 Principle of Least Action을 만족하기 위해서는 이 물리량 \(L\)이 어떤 성질을 만족해야만 하는지 확인해야 할 것이다.
Principle of Least Action을 따른다는 것은 Action \(S[\mathbf{q}(t)]\)가 \(\mathbf{q}(t)\)에서 극값을 갖는다는 의미이다. 즉, 아주 작은 Spatial Variation (\(\mathbf{q} \rightarrow \mathbf{q} + \epsilon \mathbf{u}\))에 대해서 그 변화량이 없다는 의미가 될 것이다.
\[S[\mathbf{q}(t)+\delta \mathbf{q}(t)] - S[\mathbf{q}(t)] = 0\]여기서 우리는 \(\mathbf{q}(t)\)의 변화량 \(\delta \mathbf{q}(t)\)를 임의의 벡터 \(\mathbf{u}(t)\)와 매우 작은 상수 \(\epsilon\)을 이용하여 다음과 같이 쓸 수 있다.
\[\delta \mathbf{q}(t) = \epsilon \mathbf{u}(t)\]\(\mathbf{u}(t)\)를 임의의 벡터라고 가정했지만 몇 가지 추가적인 조건이 붙게 된다. 우리가 여기서 기술하고 싶은 운동은 시간 \(t_1\)과 \(t_2\)사이의 운동 경로 변화이며 따라서 시간 \(t_1\)과 \(t_2\)에서의 \(\mathbf{q}\)값은 변화에 의한 변화가 일어나지 않기를 원한다. 즉, 다음과 같은 Boundary Condition이 추가적으로 붙게 될 것이다.
\[\mathbf{u}(t_1) = \mathbf{u}(t_2) = \mathbf{0}\]이제 이 가정들을 바탕으로 \(S[\mathbf{q}(t)+\delta \mathbf{q}(t)]\)를 구해보도록 하자. \(S[\mathbf{q}(t)+\delta \mathbf{q}(t)]\)는 Taylor Expansion을 통해서 다음과 같이 쓸 수 있다.
\[\begin{align*} S[\mathbf{q}(t)+\delta \mathbf{q}(t)] & = S[\mathbf{q}(t) + \epsilon \mathbf{u}(t)] \\ & = \int_{t_1}^{t_2} L(\mathbf{q}(t) + \epsilon \mathbf{u}(t), \dot{\mathbf{q}}(t) + \epsilon \dot{\mathbf{u}}(t), t) dt \\ & = \int_{t_1}^{t_2} L(\mathbf{q}(t), \dot{\mathbf{q}}(t), t) + \epsilon \frac{\partial L}{\partial \mathbf{q}} \cdot \mathbf{u}(t) + \epsilon \frac{\partial L}{\partial \dot{\mathbf{q}}} \cdot \dot{\mathbf{u}}(t) + O(\epsilon^2) dt \\ & \approx \int_{t_1}^{t_2} L(\mathbf{q}(t), \dot{\mathbf{q}}(t), t) + \epsilon \frac{\partial L}{\partial \mathbf{q}} \cdot \mathbf{u}(t) + \epsilon \frac{\partial L}{\partial \dot{\mathbf{q}}} \cdot \dot{\mathbf{u}}(t) dt \end{align*}\]마지막 등식은 \(\epsilon\)이 매우 작기때문에 1차항만을 남기고 모두 소거하여 Approximation하는 과정을 나타낸다. 따라서 \(S[\mathbf{q}(t)+\delta \mathbf{q}(t)] - S[\mathbf{q}(t)]\)는 다음과 같다.
\[\begin{align*} S[\mathbf{q}(t)+\delta \mathbf{q}(t)] - S[\mathbf{q}(t)] & \approx \epsilon \int_{t_1}^{t_2} \frac{\partial L}{\partial \mathbf{q}} \cdot \mathbf{u}(t) + \frac{\partial L}{\partial \dot{\mathbf{q}}} \cdot \dot{\mathbf{u}}(t) dt \\ & = \epsilon \int_{t_1}^{t_2} \frac{\partial L}{\partial \mathbf{q}} \cdot \mathbf{u}(t) - \left( \frac{d}{dt} \frac{\partial L}{\partial \dot{\mathbf{q}}} \right) \cdot \mathbf{u}(t) dt + \epsilon \left[ \frac{\partial L}{\partial \dot{\mathbf{q}}} \cdot \mathbf{u}(t) \right]_{t=t_1}^{t=t_2} \\ & = \epsilon \int_{t_1}^{t_2} \frac{\partial L}{\partial \mathbf{q}} \cdot \mathbf{u}(t) - \left( \frac{d}{dt} \frac{\partial L}{\partial \dot{\mathbf{q}}} \right) \cdot \mathbf{u}(t) dt \\ & = \epsilon \int_{t_1}^{t_2} \left[ \frac{\partial L}{\partial \mathbf{q}} - \left( \frac{d}{dt} \frac{\partial L}{\partial \dot{\mathbf{q}}} \right) \right] \cdot \mathbf{u}(t) dt \\ & = 0 \end{align*}\]두 번째 등식은 Partial Integral을 수행한 것이고 세 번째 등식은 Boundary Condition \(\mathbf{u}(t_1)=\mathbf{u}(t_2)=\mathbf{0}\)으로부터 나온 것이다. 네 번째 등식 및 \(\mathbf{u}(t)\)가 임의의 벡터라는 조건에 의하여 다음과 같은 결과를 도출할 수 있다.
\[\frac{\partial L}{\partial \mathbf{q}} - \left( \frac{d}{dt} \frac{\partial L}{\partial \dot{\mathbf{q}}} \right) = 0\]이 결과가 바로 Euler-Lagrange Equation이다. 이 Euler-Lagrange Equation을 만족하는 물리량은 Principle of Least Action을 따르는 물리량이며 Lagrangian이라고 정의한다. 이러한 Lagrangian의 대표적인 예로 Kinetic Energy \(T\)와 Potential Energy \(V\)의 차인 \(L=T-V\)가 있다.
추가적으로 라그랑주 역학에서 Euler-Lagrange Equation은 뉴턴 역학에서의 Equation of Motion과 동치이다.
Lagrangian의 특징
Lagrangian은 위에서 예로 들었던 \(L=T-V\) 뿐 아니라 다양한 값이 될 수 있다. 하지만 이러한 다양한 Lagrangian들 사이에는 어떤 중요한 관계가 존재한다. 그 관계는 아래와 같다.
\[\begin{align*} L_1(\mathbf{q}, \dot{\mathbf{q}}, t) & = L_2(\mathbf{q}, \dot{\mathbf{q}}, t) + \frac{d}{dt}f(\mathbf{q}, \dot{\mathbf{q}}, t) \end{align*}\]즉, 어떤 특정 Lagrangian \(L_1\)에 대하여 위의 관계를 만족하는 Functional \(f(\mathbf{q}, \dot{\mathbf{q}}, t)\)가 존재한다면, Functional \(L_2\)는 Lagrangian \(L_1\)와 마찬가지로 현재의 Point \((\mathbf{q}, \dot{\mathbf{q}}, t)\)에서 최소의 Action을 갖게 되며 따라서 물리량 \(L_2\) 역시 Lagrangian이다.
증명은 다음과 같다.
\[\begin{align*} S_1 = \int_{t_1}^{t_2}L_1 dt & = \int_{t_1}^{t_2}L_2 + \frac{d}{dt}f(\mathbf{q}, \dot{\mathbf{q}}, t) dt \\ & = S_2 + \left[ f(\mathbf{q}, \dot{\mathbf{q}}, t) \right]_{t_1}^{t_2} \\ & = S_2 + f(\mathbf{q}(t_2), \dot{\mathbf{q}}(t_2), t_2) - f(\mathbf{q}(t_1), \dot{\mathbf{q}}(t_1), t_1) \end{align*}\]여기서 \(f(\mathbf{q}(t_2), \dot{\mathbf{q}}(t_2), t_2) - f(\mathbf{q}(t_1), \dot{\mathbf{q}}(t_1), t_1)\)은 Action의 Spatial Variation (\(\mathbf{q} \rightarrow \mathbf{q} + \epsilon \mathbf{u}\))에 영향을 주지 않게 되어 Euler-Lagrange Equation을 유도하는 과정에서 상수로 취급되어 사라지게 된다. 즉 \(L_1\)과 \(L_2\)는 Point \((\mathbf{q}, \dot{\mathbf{q}}, t)\)에서 최소의 Action을 갖게 된다.